")
")
1.Applicable to six-axis robotic arms for automated handling of entire mold fixture plates on CNC milling machines.
2.Weight: 3 kilograms.
3.Pneumatic control, with an air supply requirement of 6 bar.
4.Maximum load capacity: 100 kilograms.
2.Weight: 3 kilograms.
3.Pneumatic control, with an air supply requirement of 6 bar.
4.Maximum load capacity: 100 kilograms.
Model :
FJ-AD29-SENSOR
Simple structure: The clamping and supporting surface is made of HRC57 stainless steel, ensuring durability and the ability to withstand higher loads.
Built-in sensor: Capable of detecting whether the object is being gripped or released.
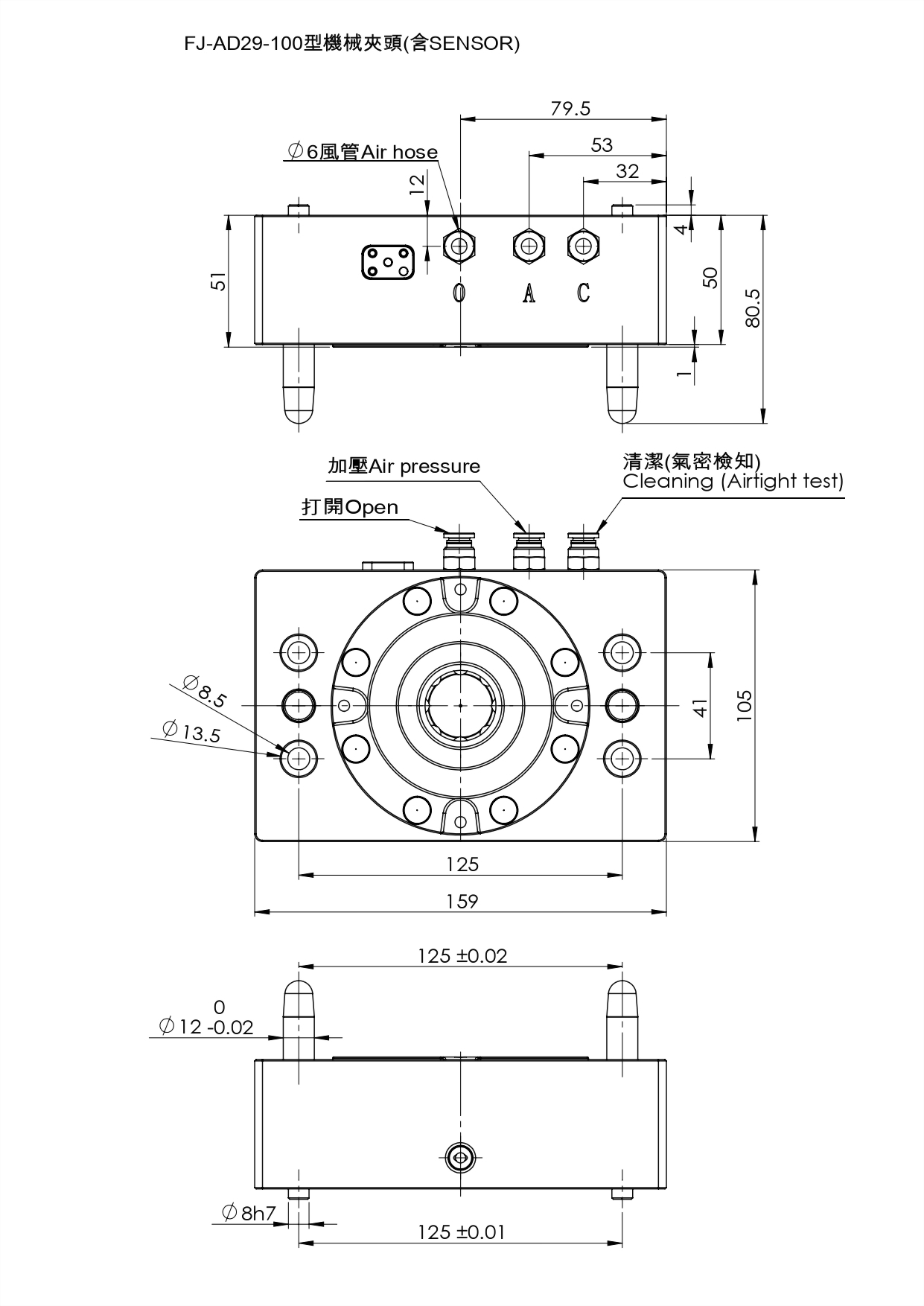
Drive method: Pneumatic, with a minimum air supply pressure of 6 bar.
Wide application: Primarily used in automated production, effectively improving production efficiency.
Dimensions:Gripper diameter100mm
Drive method:
· Pneumatic: Operating pressure 6 bar.
Sensor function:
· Sensing distance: 1.5mm
· Maximum detection distance: 2.5mm. Stable detection even in vibrating operating environments.
· Low current consumption.
High-precision gripping:The built-in sensor detects whether the object is being gripped or released, ensuring precise gripping.
Flexible adaptation: Capable of gripping trays, with the ability to handle objects of various shapes and sizes on top of the trays.
Durable materials:The clamping and supporting surface is made of HRC57 stainless steel, ensuring durability and the ability to withstand higher loads.
Automated control: Pneumatic operation enhances operational efficiency.
Versatile: Widely used in automated production lines, material handling, and other fields.
Easy installation and maintenance:Simple to install and maintain.
Robotic arm application in production: Works in conjunction with robotic arms for precise operations, enhancing efficiency.